自動運転や先進運転支援システム(ADAS)は、人間の目や耳の代わりとなる複数のセンサーを使って周囲の環境を認識しています。車両の前後や側面にはカメラ・レーダー・LiDAR(ライダー)・超音波センサーなどが搭載されており、それぞれが異なる情報を収集しています。
例えば車線や信号の認識はカメラ、前方車両との距離測定はレーダー、立体的な空間把握はLiDARが得意です。自動運転は単一の技術で実現されているのではなく、複数のセンサーを連携させることで安全性と認識精度を高めています。
カメラ・レーダー・LiDARにはそれぞれ得意分野がある
自動運転で使われる主要センサーは、それぞれ異なる特徴を持っています。カメラは人間の目に近く、標識や信号の色、歩行者の形状などを認識する能力に優れています。
一方で、夜間や逆光、悪天候では認識精度が低下しやすいという弱点があります。レーダーは電波を利用するため、雨や霧でも安定して距離や速度を測定できます。
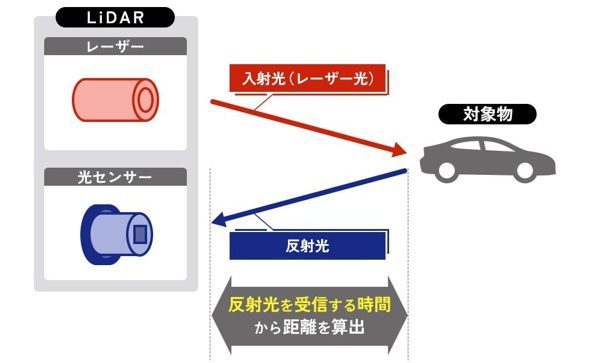
LiDARはレーザー光を用いて周囲を三次元的に把握できるため、高精度な位置認識が可能です。このように各センサーは得意分野が異なるため、単独ではなく組み合わせて活用されています。
センサーフュージョンが高い安全性を支えている
自動運転の中核技術のひとつが「センサーフュージョン」です。これは複数のセンサーから取得した情報を統合し、より正確な判断を行う仕組みを指します。例えばカメラが歩行者を認識し、レーダーがその距離や移動速度を測定し、LiDARが位置や形状を立体的に把握します。
こうした情報をAIがリアルタイムで分析することで、単一のセンサーでは見落としや誤認識が発生する場面でも高い認識精度を維持できます。現在の自動運転技術は、センサー性能だけでなく、この情報統合技術の進化によって支えられています。
ADASや自動運転を正しく理解することが重要
現在市販されている多くの車には、自動ブレーキや車線維持支援、アダプティブクルーズコントロールなどのADAS機能が搭載されています。これらもカメラやレーダーなどのセンサーによって実現されています。
しかし、どれほど高性能なシステムでも悪天候や複雑な交通環境では認識精度が低下する可能性があります。そのため、自動運転や運転支援機能を過信せず、ドライバーが最終的な責任を持つことが重要です。センサーの仕組みや特徴を理解することで、自動運転技術をより安全かつ効果的に活用できるようになります。
CEV補助金の申請受付開始!
「CEV補助金の詳細」をご確認ください


エコ発電本舗の「商品」「補助金」メニュー
EV自動運転の主要センサーの種類と仕組み
カメラ:視覚情報で標識・車線・歩行者を認識する
カメラは人間の目に最も近いセンサーであり、画像・映像として周囲の視覚情報を取得します。現代の自動運転システムでは車体前方・後方・左右に複数のカメラを配置し、広角・望遠など異なる画角のカメラで死角なく周囲を撮影します。カメラの強みは色・模様・形状・文字を識別できることです。
車線の白線・黄線の認識・信号の色の判定・道路標識の文字読み取り・歩行者の姿勢予測などはカメラが最も得意とする領域です。AIを使った画像認識技術(ディープラーニング)の進歩により、カメラの物体認識精度は近年劇的に向上しています。
テスラはカメラのみ(カメラオンリービジョン)での自動運転実現を目指すアプローチを採用しており、カメラとAIの組み合わせで十分な認識能力を実現できると主張しています。一方でカメラの弱点は夜間・逆光・濃霧・大雨など視界が悪い状況での性能低下と、カメラは「見えている」だけで距離を正確に測定するには複数カメラのステレオ視や他センサーとの組み合わせが必要な点です。
レーダー・LiDARで距離と速度を正確に測定する
レーダー(RADAR:電波を使った距離・速度測定センサー)は電波(マイクロ波)を発射して反射波を受け取ることで前方・周囲の物体までの距離・速度を測定します。
レーダーの最大の強みは悪天候(雨・霧・雪)に強く夜間でも安定して機能する点と、物体の相対速度を直接測定できる点です。前方衝突警告・自動緊急ブレーキ(AEB)・アダプティブクルーズコントロール(ACC)に必須のセンサーであり、多くの市販車に搭載されています。
LiDAR(Light Detection And Ranging:レーザー光を使った3次元距離センサー)はレーザー光を360度に照射してその反射時間を計測することで、周囲環境の高精度な3次元点群マップをリアルタイムに生成します。LiDARはカメラより高精度な距離測定と3次元形状の把握が得られますが、コストが高く雨・霧への耐性はレーダーより劣る面があります。ウェイモなどの高度自動運転システムではLiDARが重要なセンサーとして使われています。
CEV補助金の申請受付開始!
「CEV補助金の詳細」をご確認ください
エコ発電本舗の「商品」「補助金」メニュー
自動運転は「センサーフュージョン」で弱点を補い合う

複数センサーを組み合わせて認識精度を高める
カメラ・レーダー・LiDARはそれぞれ異なる強みと弱点を持っており、自動運転の高い安全性を実現するためには複数センサーを組み合わせる「センサーフュージョン」が重要です。カメラが苦手な夜間や悪天候ではレーダーが主役となり、レーダーが苦手な物体の形状認識やラベル識別はカメラが補います。
LiDARは高精度な3次元マッピングで死角の物体を正確に把握し、カメラが認識した物体との距離をLiDARが確認するという役割分担も効果的です。センサーフュージョンのアルゴリズムは各センサーのデータをリアルタイムで統合し、矛盾するデータに対して整合性チェックを行いながら最も信頼性の高い認識結果を生成します。
センサーフュージョンの精度向上が自動運転の安全性向上に直結しており、各社がAI・ソフトウェアへの多大な投資を続けています。センサーの数を増やすだけでなく、データの統合・判断ロジックの精度が自動運転の実力を決める重要な要素です。
超音波センサーと高精度地図の役割
自動運転・運転支援に使われるセンサーにはカメラ・レーダー・LiDARに加えて超音波センサーも使われています。超音波センサーは音波を使って数十cm〜数メートル以内の近距離にある物体を検知するもので、駐車アシスト・後退時の障害物検知・低速走行時の周囲監視に多用されています。
近距離での精度が高く安価なため、多くの車種に標準装備されています。さらに自動運転システムは「HD地図(高精度地図)」を組み合わせることで、センサーの認識だけに頼らずあらかじめ収録された道路構造・信号位置・車線情報を参照しながら走行計画を立てます。
HD地図とセンサー認識を組み合わせることで、センサーが一時的に認識しにくい状況でも安全な走行判断を継続できます。HD地図は常に最新状態に保つ必要があり、クラウドとの常時接続・更新が自動運転インフラの重要な要素です。
CEV補助金の申請受付開始!
「CEV補助金の詳細」をご確認ください
エコ発電本舗の「商品」「補助金」メニュー
EVの「ADASセンサー」活用例

前方衝突警告・自動緊急ブレーキの仕組み
市販車に搭載が進んでいる自動緊急ブレーキ(AEB:Autonomous Emergency Braking)は、主に前方レーダーとカメラのセンサーフュージョンで実現されています。前方レーダーが先行車・障害物との距離と相対速度をリアルタイムで計測し、衝突リスクを計算します。
カメラは前方の物体が「車か」「人か」「静止物か」を識別し、レーダーの検知情報と照合します。両センサーのデータを統合して衝突が避けられないと判断した場合、システムがドライバーへの警告と自動ブレーキ作動を即座に実行します。
夜間・雨天での歩行者検知はカメラの苦手な場面でもありますが、赤外線カメラや高感度カメラの採用で改善が進んでいます。レーン逸脱警告・アダプティブクルーズコントロール(ACC)・車線維持支援も同様にカメラとレーダーの組み合わせで実現されており、ドライバーの疲労軽減と安全性向上に貢献しています。
悪天候でのセンサー性能と自動運転の限界
自動運転センサーの課題として、悪天候時の認識精度低下があります。大雨・濃霧・降雪時はカメラの視界が悪化し、レーダーも雨粒や雪による反射で精度が下がることがあります。
LiDARも雨・霧に対して弱点があります。このため自動運転システムは悪天候を検知すると自動的に機能を制限し、ドライバーへの手動操作への移行を促す設計になっています。自動運転の安全性は晴天・良好な環境では高い水準ですが、極端な悪天候・複雑な環境(未整備の道路・工事現場・非定型の障害物)では人間の判断が必要な場面が残ります。
現在の自動運転・ADASは「ドライバーを支援する道具」として適切な場面で活用し、過信しないことが安全なカーライフの基本です。技術の進歩とともに悪天候対応・複雑環境対応の改善が続いており、将来的にはより広い条件での自動運転が実現することが期待されています。
CEV補助金の申請受付開始!
「CEV補助金の詳細」をご確認ください
エコ発電本舗の「商品」「補助金」メニュー
センサーが誤認識を起こす“境界状況”とは?

センサーが判断を迷いやすいシーンを理解しておくことが安全につながります
自動運転センサーは高性能ですが、どんな状況でも完璧に認識できるわけではありません。特に「境界状況(エッジケース)」と呼ばれる特殊な環境では、カメラ・レーダー・LiDARがそれぞれ誤認識を起こしやすくなります。
例えば、逆光で白飛びした歩行者、工事現場の複雑な反射物、雪で覆われた車線、鏡面のように光を反射する車体などは、AIが通常のパターンと異なるため判断が難しくなります。こうした状況ではセンサー同士のデータが矛盾し、システムが安全側に倒して警告や機能制限を行うことがあります。ドライバーが「センサーにも苦手な場面がある」と理解しておくことで、ADASを過信せず適切に補助として使えるようになります。
センサーの汚れ・取り付け位置・経年劣化も認識精度に影響します
自動運転センサーは電子部品であると同時に“外にむき出しの装置”でもあるため、日常の環境による影響を受けやすい特徴があります。例えば、カメラレンズに虫・泥・雨粒が付着すると画像がぼやけ、歩行者や車線の認識精度が低下します。
レーダーはバンパー内部に隠れているものの、雪や氷が厚く付着すると電波の透過性が落ちて検知距離が短くなります。LiDARもレンズの汚れや微細な傷で反射光が乱れ、点群データの精度が下がることがあります。また、経年劣化によるセンサーの感度低下も無視できません。定期的な清掃・点検・キャリブレーションが重要であり、これらを怠ると本来の性能を発揮できなくなります。センサーを“車の目”として扱い、日常的に状態を気にかけることが安全運転につながります。
エコ発電本舗の「商品」「補助金」メニュー
まとめ:複数センサーの協調がEVの自動運転の安全を支える
自動運転は複数のセンサーで周囲を認識している
自動運転や先進運転支援システム(ADAS)は、単一のセンサーだけで周囲を判断しているわけではありません。カメラ・レーダー・LiDAR・超音波センサーなど、それぞれ特性の異なる複数のセンサーを組み合わせて認識を行っています。
カメラは標識や信号、歩行者の識別が得意で、レーダーは距離や速度の測定に優れています。LiDARは高精度な3次元空間認識を担当し、超音波センサーは駐車時など近距離の障害物検知を担います。こうした複数の情報を統合することで、人間の目だけでは難しい高度な状況認識を実現しています。
センサーフュージョンが安全性向上のカギを握る
自動運転技術の中核となるのが「センサーフュージョン」です。これは複数のセンサーから得られた情報を統合し、より正確な認識結果を作り出す技術です。例えば、カメラが物体を認識し、レーダーが距離と速度を測定し、LiDARが立体的な位置関係を把握します。
各センサーの結果を照合することで誤認識を減らし、単独のセンサーでは対応しにくい状況にも対処できます。センサーの性能だけでなく、取得したデータをどれだけ高精度に統合できるかが、自動運転システム全体の安全性や信頼性を左右する重要な要素になっています。
AIと高精度地図が認識能力をさらに高める
近年の自動運転はセンサーだけでなく、AIと高精度地図(HDマップ)を組み合わせることで認識能力を向上させています。AIは膨大な走行データを学習し、歩行者や自転車、道路標識などを高い精度で識別します。一方、高精度地図には車線形状や信号位置、道路構造などの詳細な情報が記録されており、センサー情報と照らし合わせながら走行判断を行います。
これにより、一時的にセンサーの認識が不安定になった場合でも、安全な走行を継続しやすくなります。自動運転の進化は、センサー・AI・地図技術の連携によって支えられています。
自動運転は進化中だが過信は禁物
現在のADASや自動運転技術は大きく進歩していますが、万能ではありません。大雨や濃霧、降雪などの悪天候ではカメラやLiDARの性能が低下することがあり、工事現場や特殊な交通環境ではAIが判断に迷うケースもあります。
そのため、多くのシステムは異常や認識精度の低下を検知すると、ドライバーへ運転の引き継ぎを求める設計になっています。今後もセンサー性能やAIの認識精度は向上していくと考えられますが、現時点では自動運転は「運転を代わる技術」ではなく「運転を支援する技術」として理解することが重要です。
CEV補助金の申請受付開始!
「CEV補助金の詳細」をご確認ください
エコ発電本舗の「商品」「補助金」メニュー
自動運転センサーの仕組みとは?Q&A よくある質問
Q1. 自動運転にはどのくらいのセンサーが搭載されていますか?
自動運転レベルや車種によって大きく異なりますが、高度な自動運転を目指すロボタクシーや開発車両では前面・後面・側面合わせてカメラ10個以上・レーダー数個・LiDAR複数基を搭載するものもあります。市販の運転支援(ADAS)搭載車では前方カメラ1〜2個・前後レーダー1〜2個・超音波センサー8〜12個程度が一般的な構成です。センサーの数より、センサーフュージョンのアルゴリズムとAIの性能が認識精度を左右します。
Q2. テスラのカメラオンリーアプローチはなぜ特殊ですか?
多くの自動運転開発企業がレーダーやLiDARを重視する中で、テスラはカメラとAI処理のみで自動運転を実現するアプローチを採用しています。テスラは「人間はカメラ(目)だけで運転できる。十分なAIとデータがあれば同じことが車にもできる」という考え方を持ちます。大量の実際の走行データでAIを訓練することで認識精度を高める戦略ですが、悪天候や特殊な状況での認識精度に疑問を持つ専門家もいます。カメラオンリーかマルチセンサーかは自動運転業界で続く重要な技術論争のひとつです。
Q3. ADASが誤作動することはありますか?
はい、ADASは誤作動(誤検知・誤非検知)を起こすことがあります。明るい陽光・逆光・雨・汚れたセンサー・特殊な模様・複雑な交通状況などで誤った判断をするケースがあります。自動緊急ブレーキが不要な場面で作動する「誤ブレーキ」の事例も報告されています。ADASはあくまでドライバーの補助であり、ADASに全てを任せることはできません。常にドライバーが主体的に運転状況を把握し、ADASの動作を監視しながら走行することが大切です。